符号约定
本文所涉及的向量、矩阵及函数皆为实值向量、矩阵和函数
$\pmb{x}=\left[x_1, x_2, \cdots, x_m\right]^\mathrm{T}\in \mathbb{R}^m$,即默认为$m\times 1$列向量
$\pmb{X}=\left[\pmb{x}_1,\pmb{x}_2,\cdots,\pmb{x}_n\right]\in \mathbb{R}^{m\times n}$,即默认为$m\times n$矩阵
函数符号约定如下:
| 函数类型 | 自变量为向量$\pmb{x}\in \mathbb{R}^m$ | 自变量为矩阵$\pmb{X}\in \mathbb{R}^{m\times n}$ |
|---|---|---|
| 标量函数$f\in \mathbb{R}$ | $f(\pmb{x})$ | $f(\pmb{X})$ |
| 向量函数$\pmb{f}\in \mathbb{R}^p$ | $\pmb{f}(\pmb{x})$ | $\pmb{f}(\pmb{X})$ |
| 矩阵函数$\pmb{F}\in \mathbb{R}^{p\times q}$ | $\pmb{F}(\pmb{x})$ | $\pmb{F}(\pmb{X})$ |
两种布局
矩阵求导比较复杂的部分就在于哪个分量要对哪个分量求导,并且求完导后的结果按照什么形式排布。下面介绍两种布局方式。
Jacobian矩阵
标量对向量求导
将$1\times m$行向量偏导算子记为
于是,可以给出实值标量函数对$\pmb{x}$的偏导向量
注意,在这种定义下,我们对分母进行了转置,求导得到的结果也是行向量。
标量对矩阵求导
当变元是矩阵的时候,仿照上述定义,比较直观地给出下面的定义
可以看到,给出的求导结果排布仍然和转置后的分母保持一致。$\mathrm{D}_{\pmb{X}}f(\pmb{X})$即称为实值标量函数$f(\pmb{X})$关于矩阵变元$\pmb{X}$的Jacobian矩阵。
事实上,基于将矩阵向量化,还可以给出有关矩阵求导的另一种定义
这里$\mathrm{vec^{T}}(\pmb{X})$是指先将$\pmb{X}$列向量化后再转置得到行向量
$\mathrm{D_{vec}}_{\pmb{X}}f(\pmb{X})$即称为实值标量函数$f(\pmb{X})$关于矩阵变元$\pmb{X}$的行偏导向量。
上述两种结果有如下关系
向量对向量求导
我们已经得到了标量函数对向量的求导方式,要进一步推广至向量,一种很自然的想法是对向量的每个分量分别求导即可,并且我们仍然延续前述定义对分母进行转置,于是可以得到下面的定义
注意,这里相当于是列向量对行向量求导。
矩阵对矩阵求导
矩阵对矩阵求导的情况比较复杂,直观上想会有很多看似合理的结果排布方式。但并不是随意规定一种排布就可以的,它们很可能导致计算时不能推出正确的结果。
这里给出一种好的定义
首先将$p\times q$矩阵函数$F(\pmb{X})$列向量化得到$pq\times 1$的列向量
然后让$\mathrm{vec}(F(\pmb{X}))$对矩阵变元$\pmb{X}$的列向量化的转置,即$\mathrm{vec}^{\mathrm{T}}(\pmb{X})$求导,就可以得到$pq\times mn$维Jacobian矩阵
总结
对于此种布局下的矩阵求导流程总结如下
- 变元(分母)需要进行转置,即列向量应当转置为行向量,为保持一致性,矩阵变元也要进行转置
- 若为向量或矩阵函数,则首先应将分子展开,即让每个分量(应该是标量函数)分别对变元求导,此时展开的排布和分子保持一致
- 按照标量对矩阵的求导规则对每个分量进行运算,将运算所得结果放到原位置上即可
梯度矩阵
采用列向量形式定义的偏导算子成为列向量偏导算子,习惯上称为梯度算子
$m\times 1$列向量梯度算子定义为
事实上,梯度矩阵和Jacobian矩阵的定义方式几乎完全相同,区别只在于梯度算子采用列向量形式定义,也就是说分母没有进行转置;在最终得到的求导结果上,梯度矩阵和Jacobian矩阵也只差一个转置的关系。
具体公式如下
两种运算规则各有各自的应用场景,在不同的领域,可能更加“自然”的选择是不同的。在很多工程问题中,梯度矩阵就比Jacobian矩阵显得更加自然。
偏导和梯度计算
性质和法则
在计算以向量或者矩阵为变元的实值函数的偏导时,有一个基本假设:
独立性基本假设 假定向量或矩阵变元本身无任何特殊结构,即向量或矩阵的各元素之间是独立的。用数学公式可以表示为
而实值函数对于矩阵变元的梯度计算法则如下:
若$f(\pmb{X})=c$为常数,则梯度$\frac{\partial c}{\partial\pmb{X}}=O_{m\times n}$
线性法则
乘积法则
商法则
链式法则 若$\pmb{X}$为$m\times n$矩阵,且$y=f(\pmb{X})$和$g(y)$分别是以矩阵$\pmb{X}$和标量$y$为变元的实函数,则
推而广之,若记$g(\pmb{F}(\pmb{X}))=g(\pmb{F})$,其中$\pmb{F}\in\mathbb{R}^{p\times q}$,则链式法则为
计算实例
$f(\pmb{x})=\pmb{x}^{\mathrm{T}}\pmb{Ax}$
从而有
$f(\pmb{X})=\pmb{a}^{\mathrm{T}}\pmb{XX}^{\mathrm{T}}\pmb{b}$
从而有
使用类似的方法,可以按照定义得到下表:
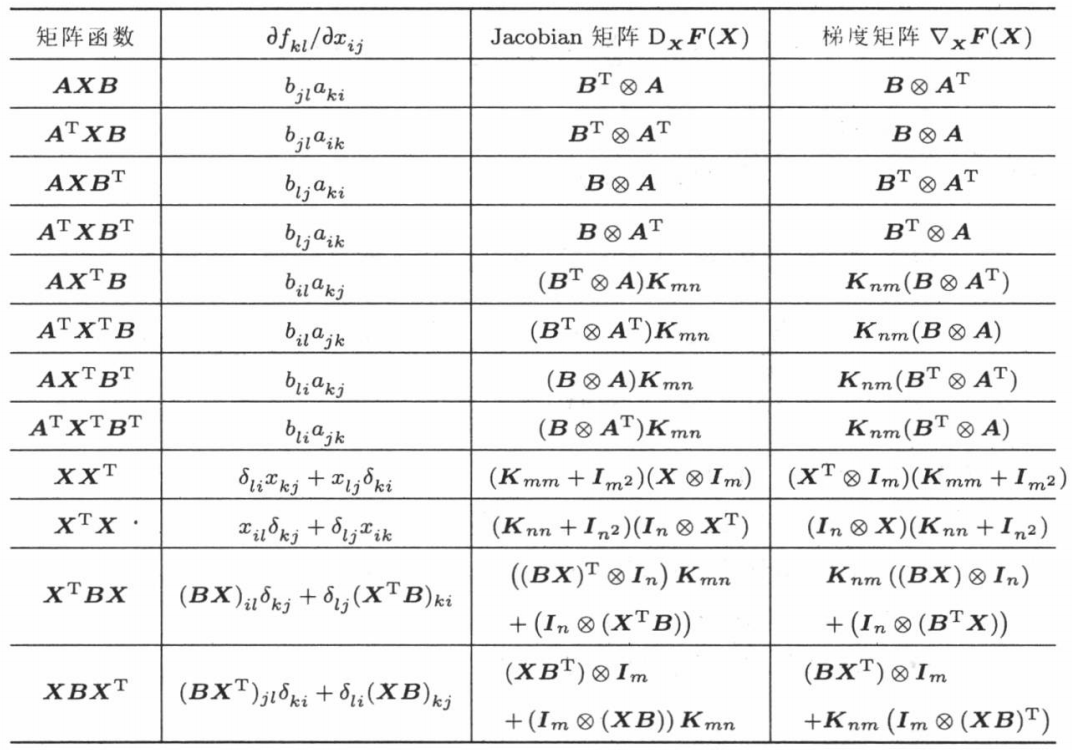
其中$\otimes$是克罗内克积,$K_{mn}$是交换矩阵
简单结论
$\pmb{A},\pmb{B},\pmb{X},\pmb{Y}$都是矩阵,且有$z=f(\pmb{Y})$,$\pmb{Y}=\pmb{AX}+\pmb{B}$
利用前述链式法则的结论,可以使用定义法得到:
若条件改为$z=f(\pmb{Y})$,$\pmb{Y}=\pmb{XA}+\pmb{B}$,则有
这个结论在求解很多优化问题的时候十分方便。
参考
机器学习中的矩阵向量求导(四) 矩阵向量求导链式法则 - 刘建平Pinard - 博客园 (cnblogs.com)
《矩阵分析与应用》张贤达